
Featured projects...
-

Animated Card Cases
A card case that uses an optical illusion to animate or say...
-

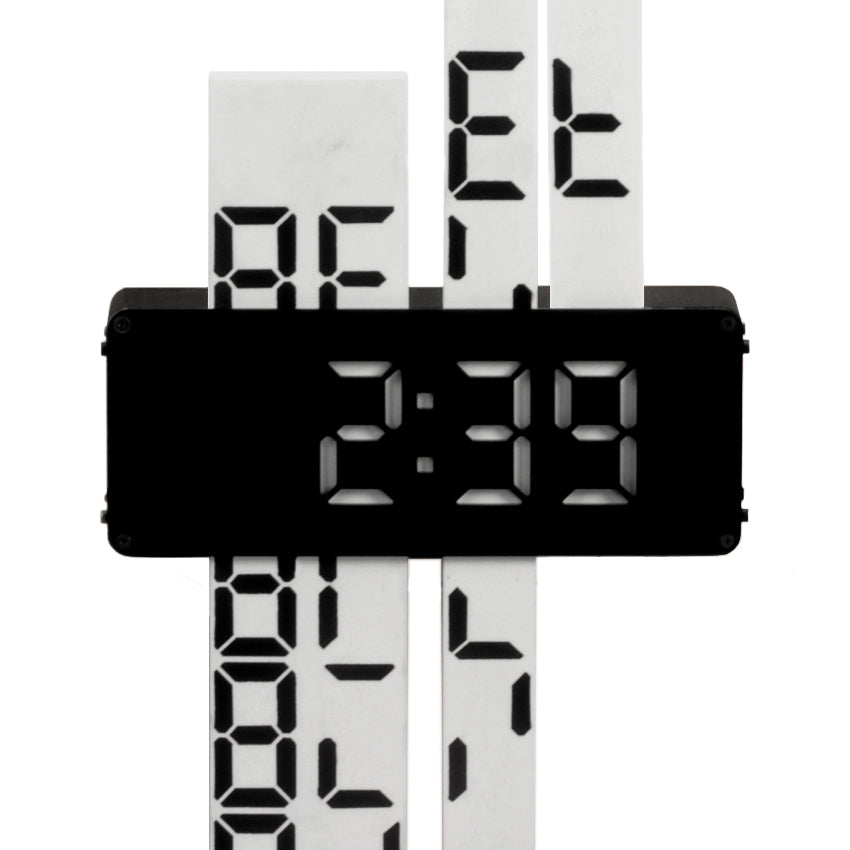
Colour O’Clock
A modern wall-clock that complements the passing of time with colour. As...
-

Spinning (desk)top
A spinning top inspired by Apple’s macOS spinning wait cursor. A desk...
-

Cloud Keyholder
Hidden magnets hold three sets of keys underneath the wall mounted cloud...




-

Planet Pins & The Moon
Push Pins. Hand-painted solar system stationery & hand cast concrete moons.
-

Laser-cut camera
Camera-shaped gift box, constructed entirely from laser etched and laser cut paperboard...
-

Realboy push pins
Hand painted Pinocchio-inspired push pins.
-
Cloud Keyholder
Hidden magnets hold three sets of keys underneath the wall mounted cloud...
-

Rainbow Pencils
Made from recycled paper, rainbow pencils let you create beautiful paper rainbows...
-

Remote control pop-up shop
The second in a series of creative pop-up shops held in Harajuku,...
-

Treehouse Vase
A single flower vase that brings warm memories of childhood to your...